A dip into Inverse Rendering
First week of looking into rabbit holes of interesting areas of art, tech, and ML.
As I’m building Artscaper, I’m realizing that automating proper image labels is a crucial aspect of the process. One possible research avenue is to determine the light sources and parameters of an image, which is an idea that emerged from my years of photography experience. For studio and artistic portraits, lighting is often a signature element for many photographers. As a candid photographer, I learned to use the lighting in a scene, but setting up lighting to mimic artists like Brandon Woefel and Limon Fan was a challenge.
Recently, I discovered the field of inverse rendering, which is an exciting area of computer graphics and computer vision that can analyze 2D visual data and determine factors such as lighting, environment geometries, and object materials.
What is Inverse Rendering?
Inverse rendering is the opposite of rendering: the process of generating a 2D image from a 3D scene, such as renders from Blender and Unity. Inverse rendering takes a 2D image and derives unknowns such as surface reflectance, lighting, and 3D scene geometry. It is a powerful tool in computer graphics and computer vision for understanding and modeling real-world scenes and objects from 2D images.
Some of the use cases of inverse rendering include:
- AR - To enable effective object insertion and create seamless mixed-reality illusions in AR, inverse rendering can be leveraged to understand the user’s environment. This technique allows for accurate rendering of proper occlusion, reflected light, and perspective, taking into account the complexity of indoor and outdoor lighting and lighting diffusion, which can vary based on the user’s position and environment. This is a harder problem than just using a heuristic of a directional light’s transform since indoor vs outdoor lighting and lighting diffusion vary depending on one’s position and environment.
- Film/Games - Inverse rendering can reduce the manual labor required for rendering objects in a scene and can make the objects appear more realistic with other types of lighting. Additionally, inverse rendering can help with the creation of special effects and can be used to simulate complex lighting scenarios.
- 3D environment reconstruction and NeRFs - Inverse rendering overall can reconstruct environments such as interiors and landmarks for both record-keeping as interactable assets (Library of Alexandria problem) as well as applications in training, real estate, and interior design work. In addition, inverse rendering can be used to develop immersive VR experiences, allowing users to virtually explore reconstructed environments, like visiting someone’s house in VR.
- Computer Vision - Lighting, angles, and lens artifacts are all barriers to robust object detection for computer vision. Analyzing the image and understanding lighting, reflectance, and the 3D environment through pure optics can allow algorithms to reverse engineer the setting for better embodied AI applications.
What does Inverse Rendering include?
According to this overview by Microsoft Research Asia, there are three main unknowns to derive in inverse rendering:
- Surface Reflectance
- Scene Geometry
- Lighting/Illumination
Surface Reflectance
This unknown is found usually by assuming or knowing the surface geometries and lighting of the scene. Those features can allow an algorithm to use the Bidirectional Reflectance Distribution Function (BRDF).
The BRDF is a function used to estimate reflectance in relation to illumination and viewing geometry, which depends on the surface’s structural and optical properties. This can include factors such as shadows, scattering, transmission, and absorption. In 3D applications with 2D geometry planes, the Spatially Varying Bidirectional Reflectance Distribution Function (SVBRDF) is often used instead. The SVBRDF is a 6-dimensional function that can determine the reflectance matrix of a mesh face at different 2D locations on the surface.
Scene/Surface Geometry
This topic honestly deserves its own deep dive. There are a lot of different ways that scene and surface geometry can be determined. Some of the methods I have worked with include LiDAR scanning and stereo photometry, and I know other groups who have worked with zero-shot estimation models as well as normal map generations.
Photometry is a traditional way of reconstructing surface geometry. Using stereo images and multiple view methods, an algorithm can triangulate corresponding points in 3D space from each image. For stereo images, disparity maps are often a method to determine object outlines and relative depth. With proper camera calibration, the depth of an object can be estimated. However, this requires a lot of known information, especially the configuration of the camera (position and rotation of the camera, lens parameters). Camera parameters for computer vision will also probably be a future deep dive topic, as the construction of a camera lens, coupled with the body’s sensor, can result in vastly different images for computer vision applications.
Current Lighting Estimation Research
Lighting estimation is the most interesting aspect of inverse rendering for me, especially determining the lighting from one image alone. Previous methods have had to know priors in 3D scenes, such as this method using deconvolution of the reflected light field given a known geometry and BRDF. This is a robust method but requires the knowledge of priors. More recently, ML methods have emerged to provide accurate and complex reconstructions of lighting for near-photorealistic object insertion from just one image. Here are some of the papers I read through:
InverseRenderNet
This paper focused mainly on outdoor lighting scenes and was able to generate realistic shading renders from one input picture, as shown in the following picture from the paper:
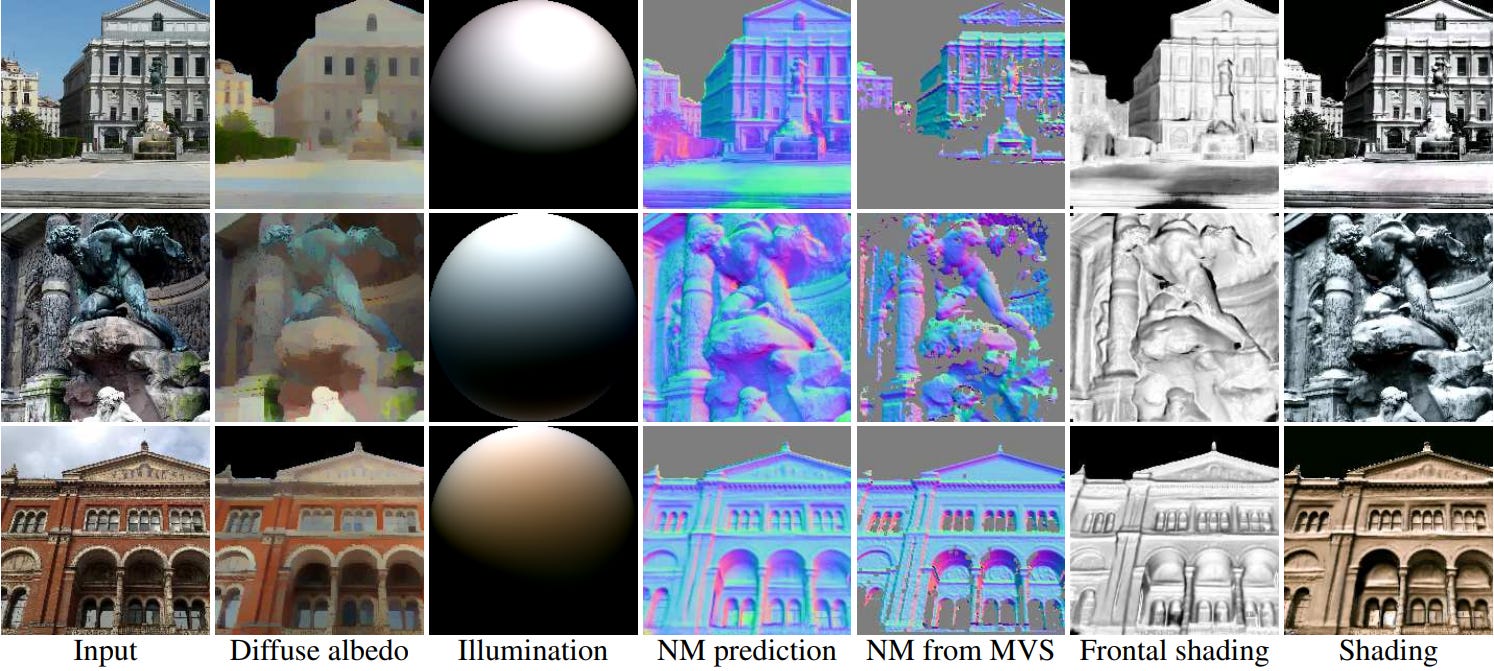
Their approach used a CNN, with pre-calculated priors for supervision and a multiview stereo pipeline for improved supervision while learning. They first decomposed the albedo and normal maps from an RGB image input with an encoder-decoder CNN architecture. The lighting could already be inferred from the input image given the albedo and normal maps.
The model then could solve for the spherical harmonic illumination coefficients of the whole image. Spherical harmonics are a set of functions that form an orthonormal basis on the unit sphere, and they have the useful property of being able to represent any function that is defined on the sphere. To do this, the team took a dataset of HDR spherical panoramic images and calculated the spherical harmonic coefficients. From there, lighting coefficients can be generated with a range of [0, 2pi] as well as [-pi/6, pi/6] for pitch and roll. As each illumination data entry is independent, the coefficients of the spherical harmonic basis functions are also independent. This is nice as it creates a Gaussian distribution of the data and basis functions (useful for general prediction).
As an application, the team was able to use illumination inferences to relight scenes, showing realistic shading and color balance.
Deep Parametric
In order to have more realistic object insertion, knowledge about other lighting parameters must be derived. This paper focused on the localized nature of indoor lighting. As indoor lighting is more complex than outdoor due to a varying number of light sources with different properties, many hand-crafted heuristics fail. Their method produces a set of lighting parameters describing area lights in 3D from a single 2D low-dynamic range image including source positions, areas, intensities, and colors.
Here is a picture of an object insertion result (the pillows and chair are inserted into a given 2D image):

To create their training dataset, they augmented the Laval Indoor HDR Dataset, annotating each panorama image with EnvyDepth. Their ML architecture consisted of a two-stage DNN. The first stage predicts the color, position, and radius of the light sources. The second stage then refines the result and adds a depth estimation to the light source. The DNN inputs an image and outputs a 3072-dimension latent vector and is fed into a decoder to directly infer lighting parameters.
To evaluate the effectiveness of the model, the team performed qualitative user studies since humans have a different understanding of realism compared to quantitative measures. The DeepParametric method performed better than other models at the time and could mimic realistic lighting well. However, a weak point was that the model did not understand light and color scattering that well. Additionally, the model only assumes diffuse light.
Inverse Rendering for Complex Indoor Scenes
This paper improves upon the weak points of the previous paper, as well as provides interesting applications of realistic material substitution. They are able to derive and reconstruct spatially-varying lighting, shapes, and spatially varying surface reflectance from just a single RGB image input.
Using spatially varying spherical Gaussian lighting representations, inserted objects have realistic shading, shadowing, and reflection in the scene. Additionally, with SVBRDFs, the model can map photorealistic materials for material replacement. Finally, they used pre-computed radiance transfer methods (how objects transfer light between each other) and isotropic spherical Gaussians that improve upon previous spherical harmonic methods. This method could recover the high-frequency lighting, which is necessary to handle specular effects on objects.
This model outperforms previous methods in object insertion and material editing:

Spherical Gaussians
The previous paper used spherical gaussian to help its lighting representation. Once estimated lighting is determined, spherical Gaussians are a mathematical way of rendering lighting in a scene as they are a compact and efficient way to represent directional lighting. Here is a very detailed (and math-heavy) explanation of the concept.
Current Tools
There are some tools currently for inverse rendering and realistic AR object insertion:
- Google Lighting Estimation API: This API provides information on lighting cues such as shadows, ambient light, highlights, scene reflections, and environmental HDR. Additionally, it is able to determine a main directional light and simulate reflected light through ambient spherical harmonics and an HDR cube map This allows for ambient and realistic reflections on virtual objects.
- Mitsuba 3: This is a rendering system for forward and inverse light-transport simulation. Currently, it is mainly a research tool.
- NVidia 3D MoMa: NVidia is creating its own 3D reconstruction tool from 2D images with accurate light reactions.
The Future of Inverse Rendering
The field of inverse rendering has made significant progress in creating more robust and photorealistic tools that can simulate ambient and reflected light on inserted objects, as well as model detailed representations of light sources in an image.
However, most research has been focused on indoor and outdoor scenes with simple geometries, leaving a gap in models for complex and organic shapes, such as animals and humans. Furthermore, subsurface scattering is still an area of limited exploration.
Despite these limitations, the rapid progress in scene reconstruction and inverse rendering research is promising, and it may be possible to identify entire lighting setups from a single image in the future. Inverse rendering is a critical step towards embodied AI for vision applications.