Haptic Tactics
Haptic VR Proxy for Aerospace Drilling Training Applications
Demo Video:
The Problem
Boeing drills millions of holes every day, many of which are still done by hand. It’s an intensive task that requires optimal force vectors for different materials, proper lubrication, and correct drilling angles and RPM. Each hole also requires a pilot hole to guide the drillbit into position. Accuracy is crucial, as even a tiny defect can cause catastrophic failure, costing the company tens of thousands of dollars. Mechanics are also at risk of repetitive stress injuries.
To address these issues, I led a team to develop a haptic VR training system for aerospace drilling. This technology has been shown to improve training effectiveness in other fields, such as bone surgery and construction crane operation. Mechanics can now train in a safe virtual environment and feel the forces and vibrations of drilling, as well as receive feedback from the drillbit.
The Drill

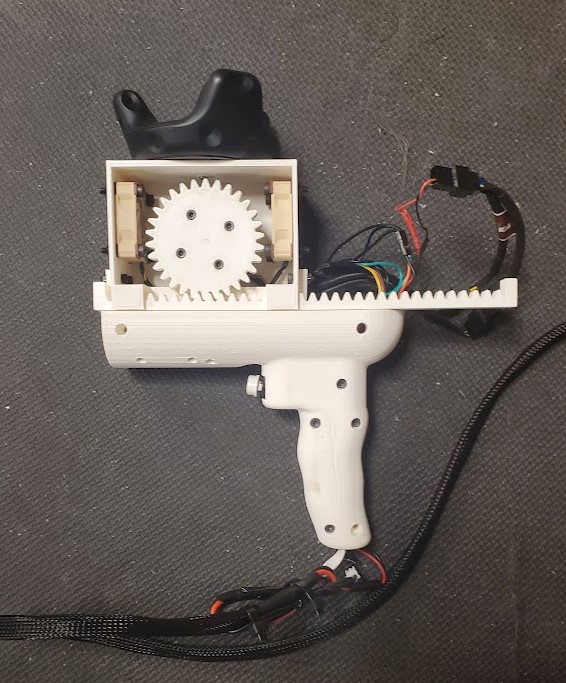
The drill proxy was modeled in SolidWorks and printed in PLA. We used a rack and pinion to transform the rotational torque provided by the BLDC into linear force feedback. The handle of the drill is hollow, allowing us to insert our PCB boards, wires, and vibromotor.
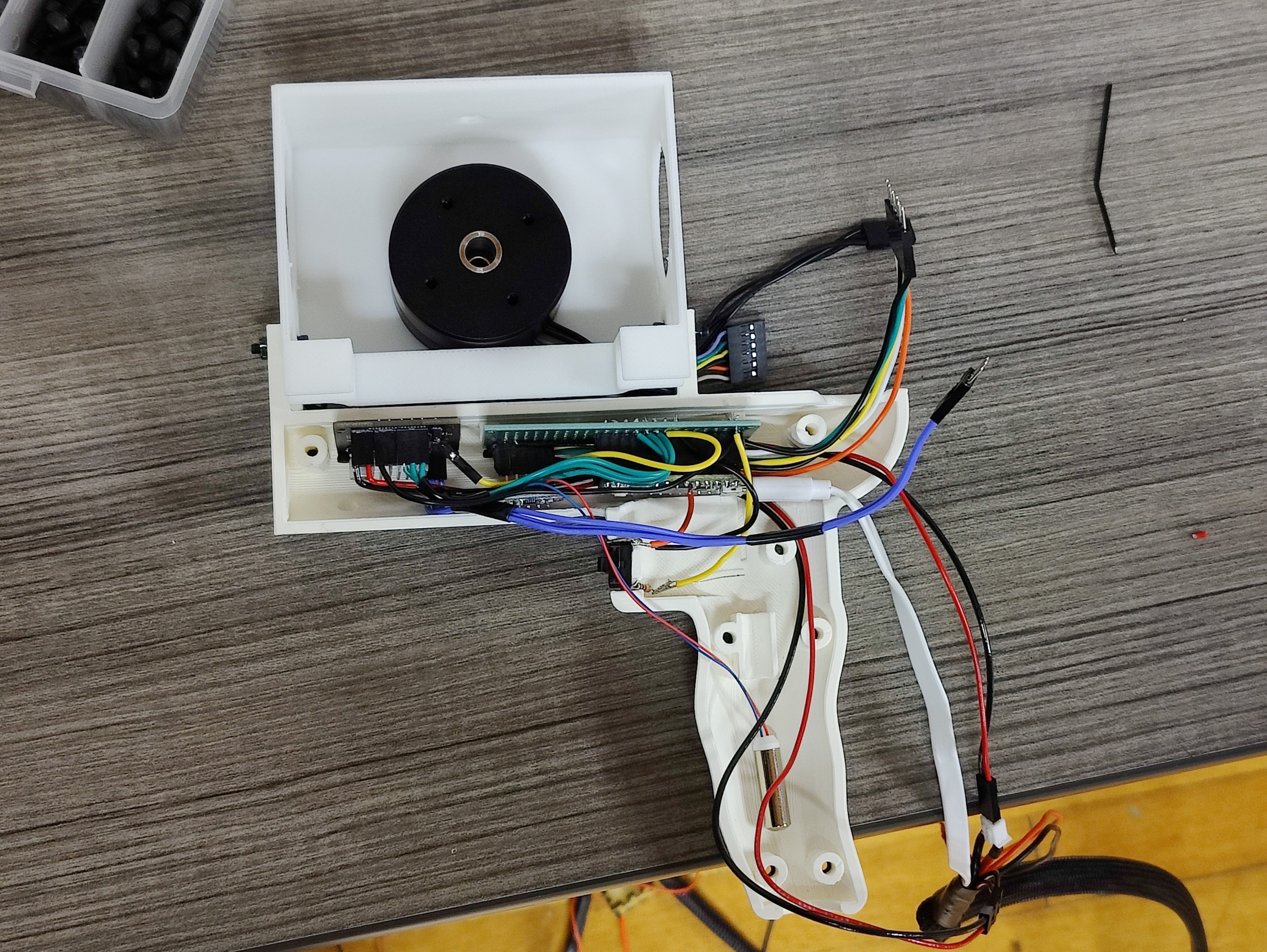
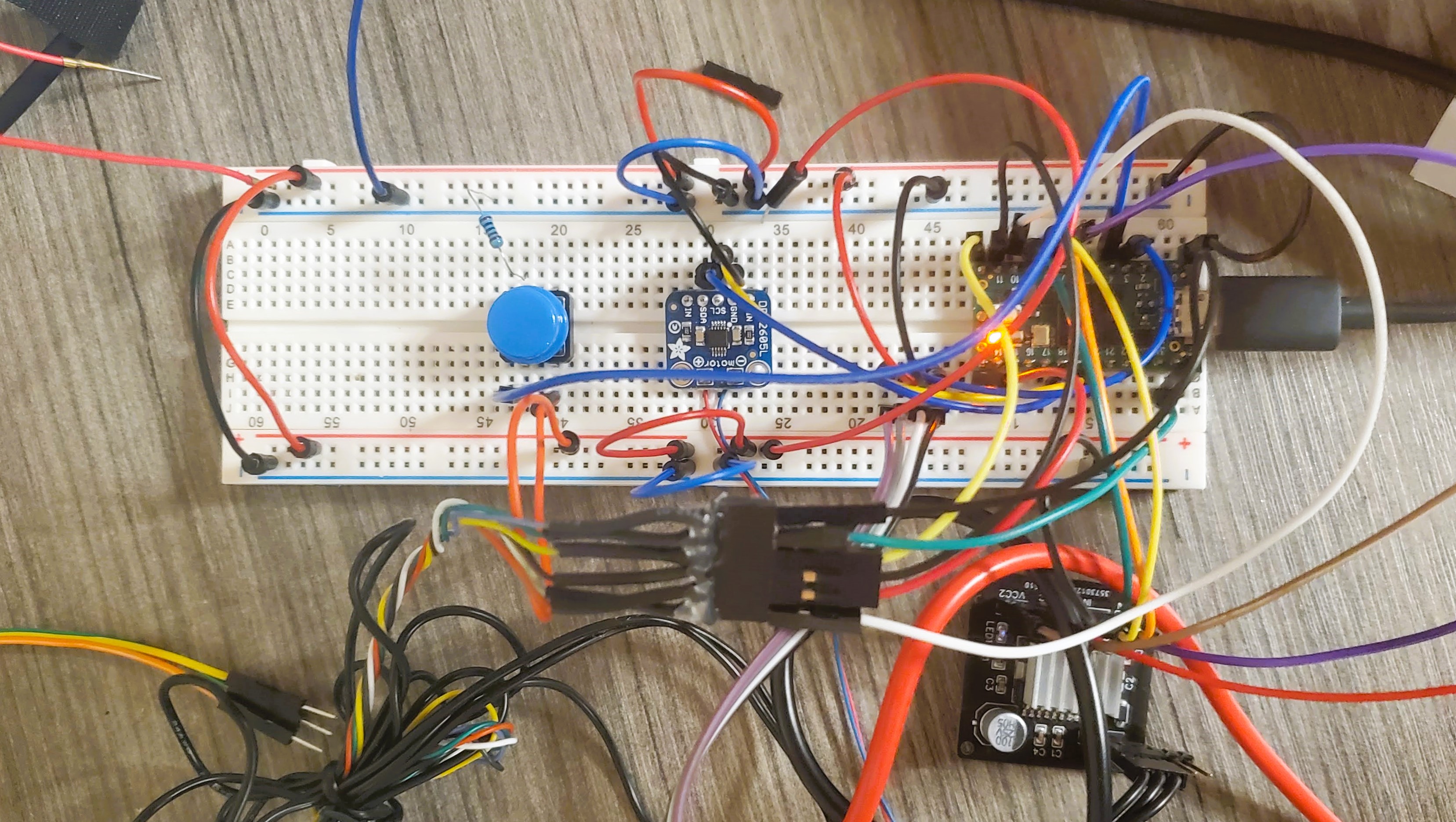
A Teensy 4.0 microcontroller was used as a middleman between the host computer and the other motor controllers. It received commands from the host computer through UART and relayed the force feedback commands to the BLDC motor controller and the vibration commands to the vibromotor. It also sent the button press and toggle switch states to the host computer. I controlled the BLDC’s resistance through modifying the SimpleFOC library and current-based PID control according to the value sent by the host computer, providing a customizable linear resistance which represented different drilling materials. We also attached two fans to the drill to provide cooling for the BLDC. Below is an image of the drill circuit during testing.
Above, you can see our VR demo in action at the CHCI symposium (where we won second place). To simulate the drilling process, we used Unity and the SteamVR plugin. We used the HTC Vive system for tracking the proxy and the “drilling target.” The proxy is represented by a 3D model of a power drill in Unity, which acts as a raycast controller and a visual representation of the drill.
The drill target is a procedurally generated multi-layered mesh. I programmed the material so that when the user drills this target, a hole is created with convincing effects that the user is actually drilling. Additionally, the drill proxy would engage its haptic feedback according to which layer (material) the user was drilling. Audio feedback was also provided to the user to simulate the drilling sound. Below is a picture of my development on the Unity environment.

Results
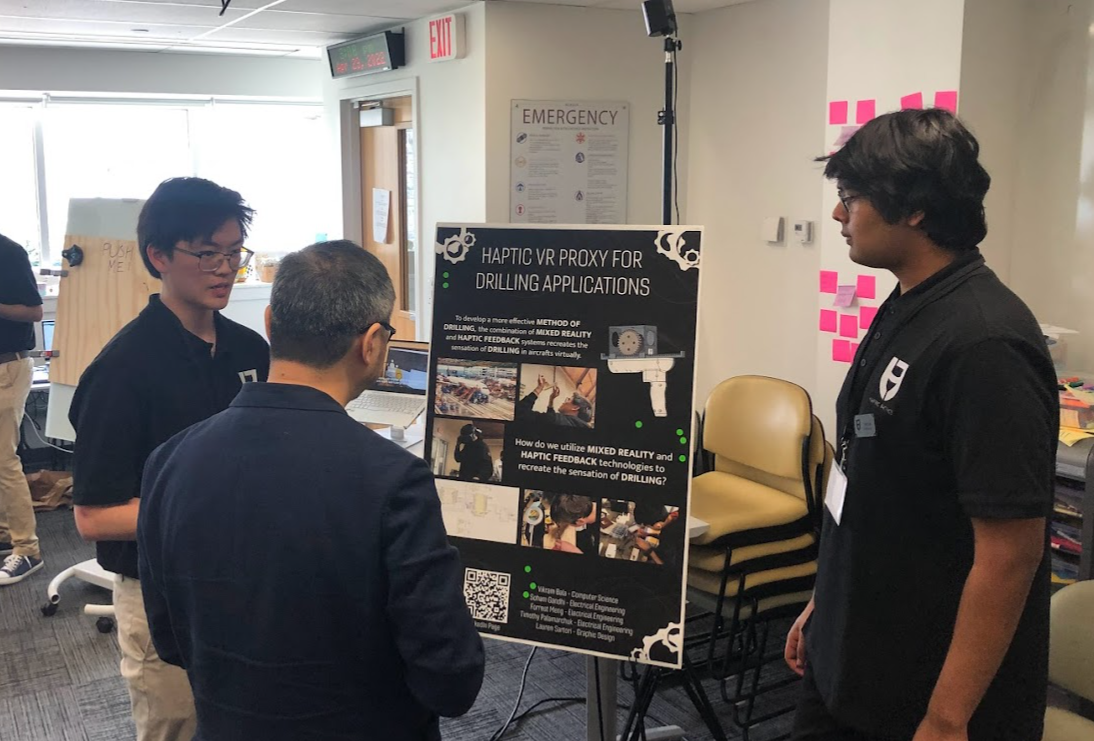
My team finished the project and presented it at the VT CHCI symposium, where we won second place while being the only underclassmen team. We also presented to the Chief Strategy Officer of Boeing (Mark Allen) and the Chief Technology Officer of CAT (Karl Weiss). With initial testing, we had an 80% success in drilling sensation satisfaction with haptic illusion.

